Researchers to develop ‘wearable’ robotic tools for surgery
Posted: 20 March 2017 | Niamh Marriott (Drug Target Review) | No comments yet
A team of researchers led by the University of the West of England (UWE Bristol) is to develop a wearable robotic system for minimally invasive surgery, also known as keyhole surgery, that will offer surgeons natural and dexterous movement as well as the ability to ‘sense’, ‘see’, control and safely navigate through the surgical environment.
Minimally invasive surgery for some clinical applications is replacing the traditional ‘open access’ approach, and has been associated with patient benefits such as reduced blood loss, fewer infections and faster recovery. More advanced robotic systems have the potential to replace laparoscopic tools for keyhole surgery in several clinical areas if developed with integrated better vision, precision and ergonomic systems.
Minimally invasive surgery
Professor Dogramadzi and the pan-EU research team have identified a need for better tools in robot-assisted minimally invasive surgery to support and enhance the surgeon’s performance in urology, cardiovascular and orthopaedic fields and to expand the potential for this technology to more complex surgical procedures.
The researchers will develop modern biomedical tools based on clinical feedback that mimic complex human dexterity and senses. These can be worn by the surgeon and transmit the surgeon’s own movements to the closed surgical interface without restrictions. This will reduce the overall cognitive, manipulation and training demand.
Wearable exoskeleton
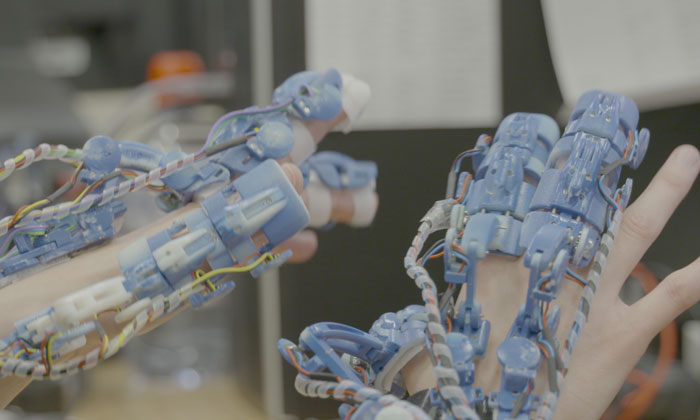
Three key pieces of hardware will be the starting points in developing the new surgical robotic system. Exoskeletons will fit over the surgeon’s hands, which will control the instruments inside the body – a newly developed surgical ‘gripper’ which mimics the thumb and two fingers of the hand.
The instrument, which goes inside the body, will have haptic abilities, allowing the surgeon to ‘feel’ the tissues and organs inside the body, just like they do during conventional surgery. An earlier version of this tool was developed at BRL by Dr Antonia Tzemanaki.
Intuitive movement
The wearable exoskeleton on the surgeon’s hand will enable movement that is more intuitive as well as giving the surgeon the sense of touch. The sense of touch in this system will be dual: current research in haptic systems mainly focuses on the arm/forearm of the user. The system developed in this project will focus on haptic feedback on the fingers of the surgeon as well.
Smart glasses
In addition, the researchers will develop smart glasses that enable the surgeon to have a realistic view of what is taking place inside the body while using the advanced robotic tools developed. The smart glasses, will allow surgeons to position themselves anywhere in the operating theatre.
Professor Sanja Dogramadzi, of Bristol Robotics Laboratory, says, “In our project the exoskeleton will record the position of the fingers and communicate this to the robotic tools inside the body using tele-operated technology. We want to give existing processes a more natural interface – operating surgeons will not have to do any unusual or unnatural movement. They will be able to use their hands as they would in open incision surgery. This also means that training to use the robotic technology for surgery will be quicker.
“The other part of our system will be smart multifunctional glasses, which will relay live images from inside the body. This is an advance compared to current systems, which use a flat TV-like screen to relay images back to the surgeon.
“The research will use the expertise and feedback of senior surgeons to develop the tools. We will use rapid prototyping to make prototype tools that the surgeons will be able to test and we will incorporate their feedback into the next stage of design. This means we can adapt tools to the needs of different surgical procedures and this user-centred design process places surgeons at the heart of the development of this system.
“We hope our research into designing this wearable system will help to expand the range of surgical procedures that can use robotic assisted systems so that more patients and hospitals can gain the benefits from this type of surgery.”
Mr Anthony Koupparis, Consultant Urologist of Bristol Urological Institute, (North Bristol NHS Trust) and Professor Raimondo Ascione, Director of TBRC and Professor of Cardiac Surgery and Translational Research in the Faculty of Health Sciences at the University of Bristol, will provide contextual feedback in the urology and cardiovascular fields respectively that is key to develop the new advanced tools.
Mr Koupparis says, “This research will allow an important step in the future with potential to help many more patients across UK and EU, while reducing the cost burden on healthcare systems.”
Professor Ascione says, “The advent of effective biomedical technologies makes this exciting collaborative project within reach. We will be delighted to test the new prototype at the state of the art national TBRC preclinical facility operating at NHS and GLPMA standards.”
Optinvent, France, will provide the technology for the tele-operated smart glasses.
The three-year research project started in January 2017 and builds on previous work in the theme of Medical Robotics and the recently established REACH (Robotics Engineering and Computing in Healthcare) Group at Bristol Robotics Laboratory.
Funding
The €4 million research project, funded by the European Commission under the HORIZON 2020 scheme, will be led by Professor Sanja Dogramadzi (Bristol Robotics Laboratory (BRL) and UWE Bristol) with nine partners including North Bristol NHS Trust, Bristol Urological Institute and the Translational Biomedical Research Centre (TBRC) at the University of Bristol, led by Director, Professor Raimondo Ascione. Professor Chris Melhuish, Director of BRL is also involved in the project.
Related topics
Research & Development, Robotics